Advanced Settings
How to Change the Robot Scheduled Interval
See Eyeglass Administration Guide igls adv failover timeout section.
Manual Export Create for Runbook Robot
In some cases, creating the NFS export used by the Robot should be disabled on each run of the Robot job and allow manual export creation to be done.
Follow these steps only when directed by support:
- Open Eyeglass shell from the main menu.
- Enter command
igls adv runbookrobot set --createExport=false. - This will require manual export create on the Robot policy path with root client set to the IP address of the Eyeglass appliance.
- Configuration sync will sync the export once created on the cluster with the enabled policy.
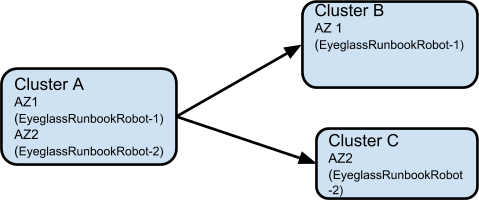
Multiple Robot Feature Support (Hub and Spoke)
Testing multi-site replication topology:
- A -> B
- A -> C
Set it up as follows:
Cluster A
- Policy 1: source path 1 to cluster B
- Policy 2: source path 2 to cluster C
| Topology | Access Zone Path | Access Zone Name | Policy Source Path | Policy Target Path |
|---|---|---|---|---|
| A -> B | /ifs/AZ1/ | EyeglassRunbookRobot-1 | Clstr A: /ifs/AZ1/P1 | Clstr B: /ifs/AZ1/P1 |
| A -> C | /ifs/AZ2/ | EyeglassRunbookRobot-2 | Clstr A: /ifs/AZ2/P2 | Clstr C: /ifs/AZ2/P2 |
Hints for Pool Mapping Setup
| Topology | Source | Target |
|---|---|---|
| A -> B | igls-01-prod | igls-01-dr |
| A -> C | igls-02-prod | igls-02-dr |
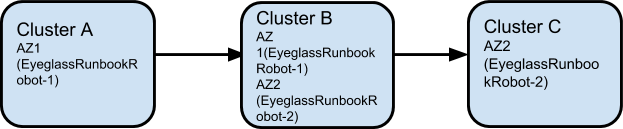
Multiple Robot Feature Support (Chain)
Testing multi-site replication topology:
- A -> B
- B -> C
Set it up as follows:
Cluster A
- Policy 1: source path 1 to cluster B
Cluster B
- Policy 2: source path 2 to cluster C
| Topology | Access Zone Path | Access Zone Name | Policy Source Path | Policy Target Path |
|---|---|---|---|---|
| A -> B | /ifs/AZ1/ | EyeglassRunbookRobot-1 | Clstr A: /ifs/AZ1/P1 | Clstr B: /ifs/AZ1/P1 |
| B -> C | /ifs/AZ2/ | EyeglassRunbookRobot-2 | Clstr B: /ifs/AZ2/P2 | Clstr C: /ifs/AZ2/P2 |
Hints for Pool Mapping Set
| Topology | Source | Target |
|---|---|---|
| A -> B | igls-01-prod | igls-01-dr |
| B -> C | igls-02-prod | igls-02-dr |
Run Multi-site Runbook Job
-
Further details for the prerequisite step before executing Runbook Robot DR Automation can be found in the prerequisite section in this document.
-
Create a subnet pool (Robot-pool) for Runbook Access Zone, set mapping alias for the Robot pool to point SmartConnect Zones between source and target Robot-pool. More information for best practices in creating Runbook Robot policy and other configuration (like zone readiness and igs hints alias, etc.) can be found in the above sections or in this link for Runbook Access Zone advance configuration.
-
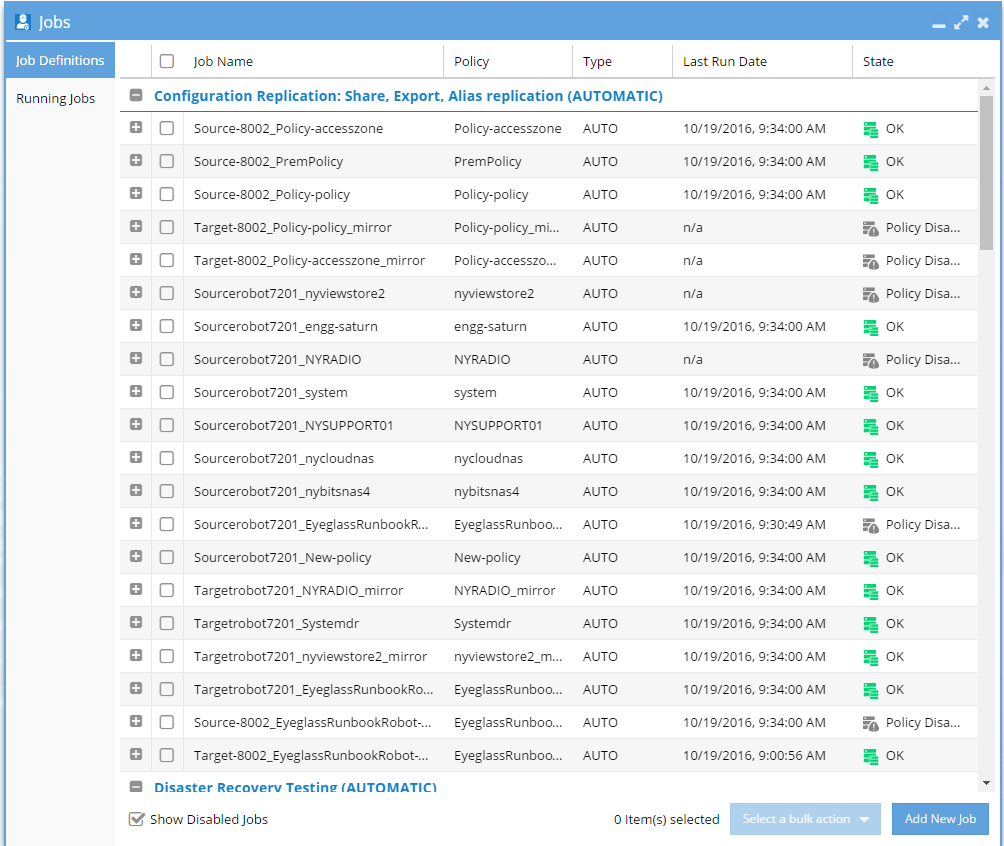
Enable the Runbook job. Run the config replication policy job.
-
Run the Runbook Failover and check the running job to find the Failover steps.
Multiple Robot Feature Support (Multiple Instances on Cluster Pairs)
Replicating in Pairs
- Cluster A -> Cluster B
- Cluster C -> Cluster D
1 Eyeglass managing 4 clusters.
Set it up as follows: Different Access Zone name and path on each pair.
Summary of Setup
| Cluster | Access Zone Name | Path | SyncIQ Policy | Mapping Hint on Robot Subnet Pool |
|---|---|---|---|---|
| Cluster A | EyeglassRunbookRobot-1 | /ifs/data/Robot | EyeglassRunbookRobot-Puru, Source path: /ifs/data/Robot, Target path: /ifs/data/Robot | igls-Robot-source8002 |
| Cluster B | EyeglassRunbookRobot-1 | /ifs/data/Robot | Source path: /ifs/data/Robot, Target path: /ifs/data/Robot | igls-Robot-target8002 |
| Cluster C | EyeglassRunbookRobot-2 | /ifs/data/Robot2 | EyeglassRunbookRobot-Robot2, Source path: /ifs/data/Robot2, Target path: /ifs/data/Robot2 | igls-Robot1-gbisi01 |
| Cluster D | EyeglassRunbookRobot-2 | /ifs/data/Robot2 | Source path: /ifs/data/Robot2, Target path: /ifs/data/Robot2 | igls-Robot1-gbisi02 |
Example
Cluster A (Source-8002)
- Policy 1 (EyeglassRunbookRobot-Puru) = source path:
/ifs/data/Robotto target path:/ifs/data/Robot
![]()
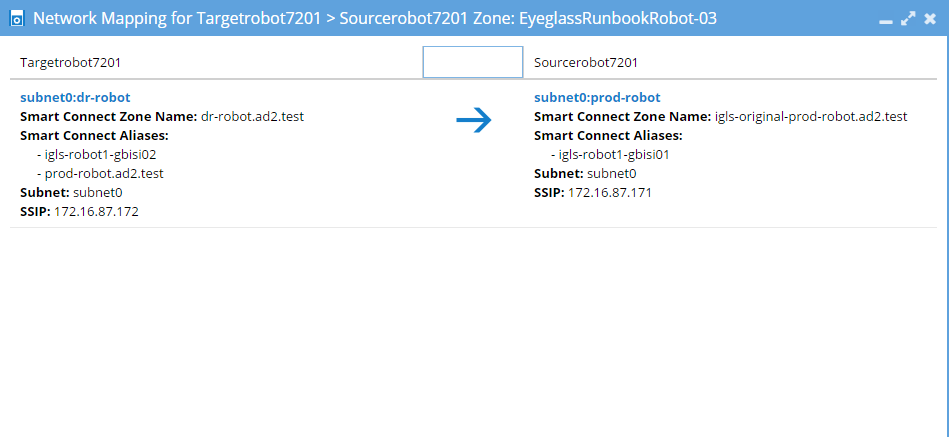
Cluster C (SourceRobot7201)
- Policy 1 (EyeglassRunbookRobot-Robot2) = source path:
/ifs/data/Robot2to target path:/ifs/data/Robot2
![]()
Detailed Configuration
-
Create an Access Zone with name beginning with “EyeglassRunbookRobot” on all four clusters (i.e., two source and two target clusters to be tested for DR).
Note: Two source Access Zone names and base paths need to be unique and not overlapping.


-
Create a SyncIQ policy on two source clusters. See Basic setup above for detailed steps.
-
Create a subnet pool and make it a member of the Access Zone.
The IP address used should be reachable by Eyeglass to mount with NFS export. Create this pool on all four clusters.
-
Dual DNS delegation needs to be done on both Source cluster Smartconnect Zone names and make sure it is resolving. (See How to Configure Access Zone DNS Dual Delegation)
-
Now create mapping alias for the Robot to move SmartConnect Zones from one pool to another. (See Eyeglass Access Zone Failover Guide “Configure Mapping Hints” section)
-
Example on Source cluster A:
isi network pools modify groupnet0.subnet0.pool4 --add-sc-dns-zone-aliases=igls-Robot-source8002 -
Example on Source cluster C:
isi network modify pool --name=subnet0:prod-RobotOnce the inventory completes (default interval: 5 minutes), the Robot Jobs will appear in a "user-disabled" state. At this stage, the job must be enabled and then run.
-
Example on target cluster B:
isi network pools modify groupnet0.subnet0.pool4 --add-sc-dns-zone-aliases=igls-Robot-target8002 -
Example on target cluster D:
isi network pools modify groupnet0.subnet0.pool4 --add-sc-dns-zone-aliases=igls-Robot-target8002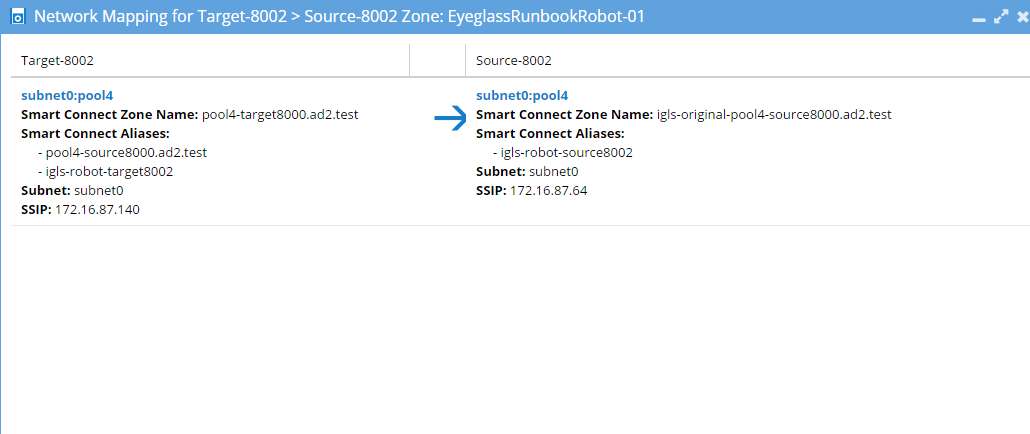


-
-
To get the Zone Readiness updated, see Advanced setup above for detailed steps.
-
Now open the DR Dashboard and select Zone Readiness to view the Robot Zone Readiness status.
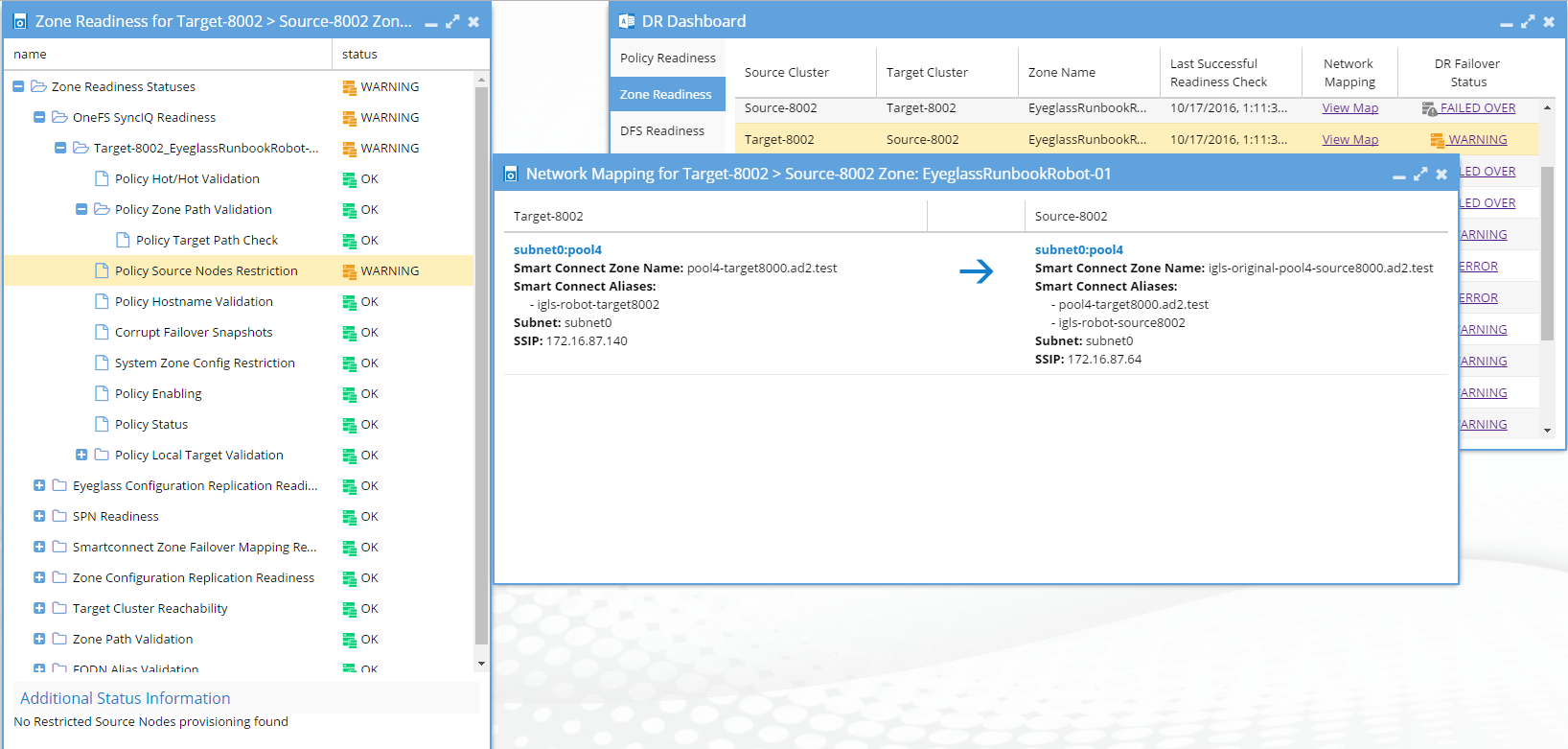
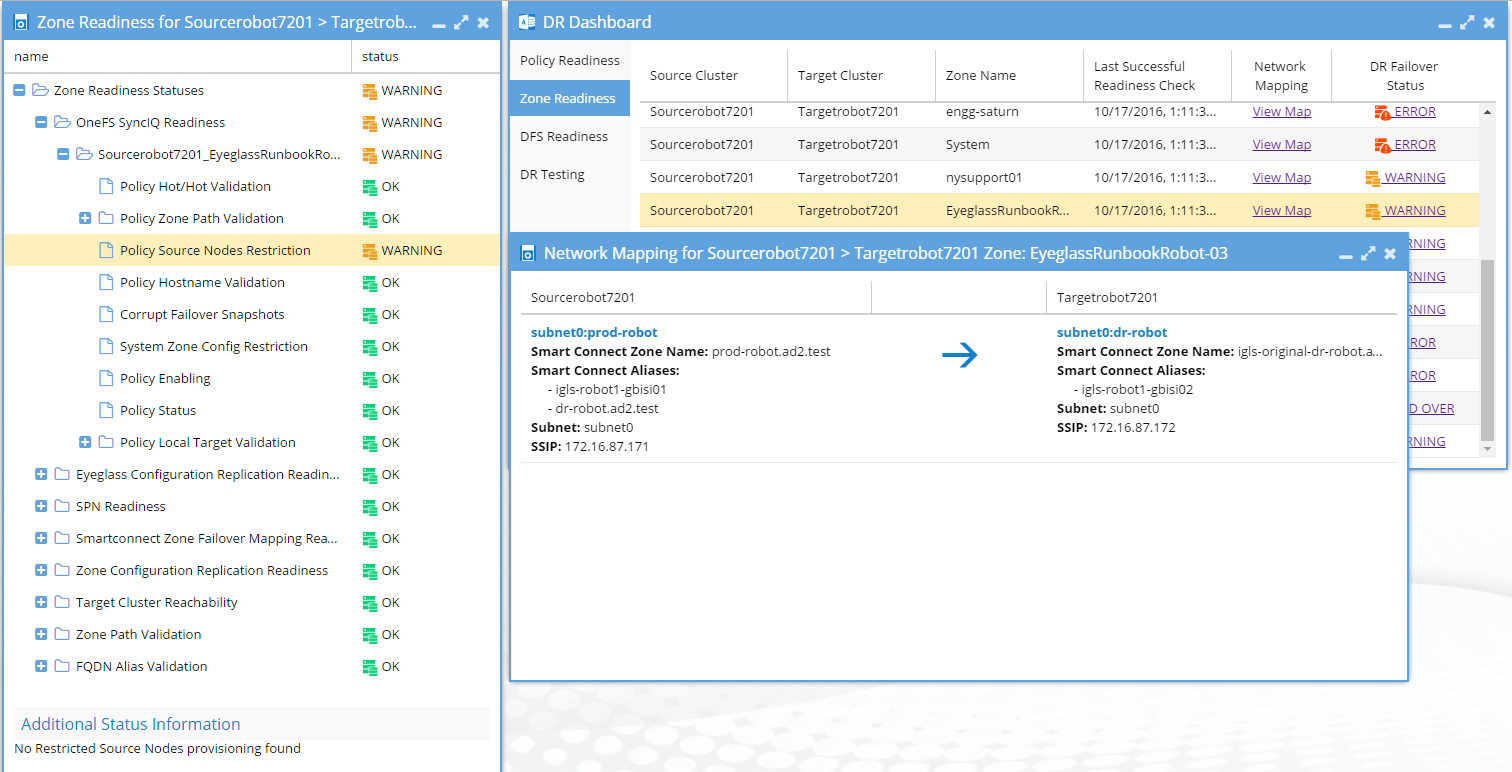
-
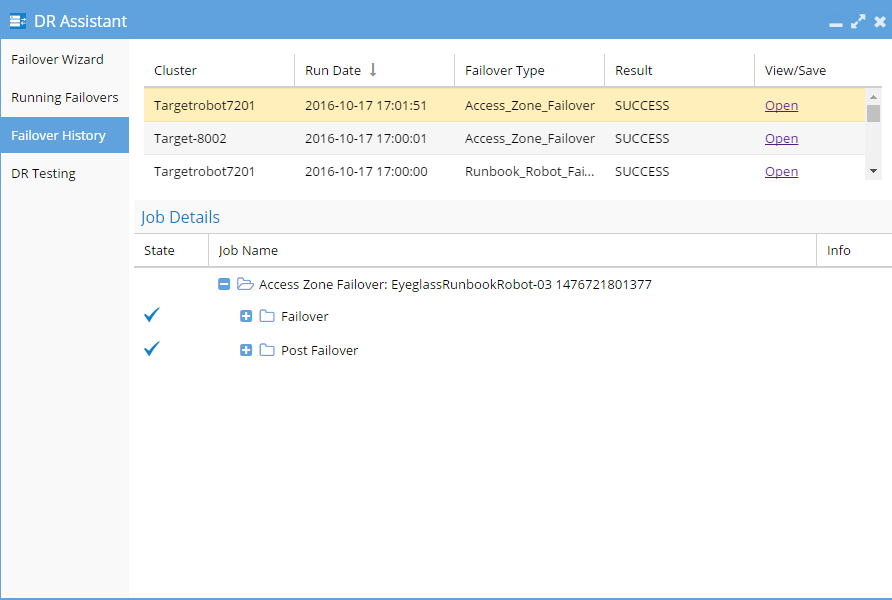
After verifying Zone readiness status, we have to run the Failover: Runbook Robot (AUTOMATIC) job to start failover.

-
After Failover, check the SmartConnect Zone alias on each cluster and look for the igls-original prefix on the SmartConnect Zone name that failed over. Refer to the Advanced setup section above for detailed steps.
-
Check the failover history:
See Also
-
Advanced DR Config: Learn how to configure advanced disaster recovery settings, including changing the Robot scheduled interval, creating manual NFS exports for Runbook Robot, and setting up multiple Robot features across various replication topologies.
-
Basic DR Config: Quick and easy setup for disaster recovery testing using non-production data, including SyncIQ policy failover, export creation, quota failover, and failback operations for DR validation.
-
How to Use Runbook Robot: Automate testing of failover infrastructure by using the Runbook Robot. It tests SyncIQ policies and access zones, records pass/fail results, and supports SMB protocol for automated failover.